Manuel de rûˋparation de la Toyota Prius 2018: Bornes De L'ecu
BORNES DE L'ECU
ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE
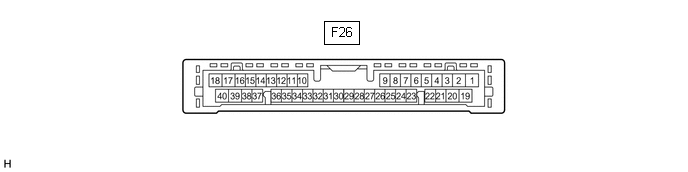
(a) Dûˋbrancher le connecteur F26 d'ensemble d'ECU d'avertissement de distance.
(b) Mesurer le connecteur de tension et de rûˋsistance cûÇtûˋ faisceau de cûÂbles selon la(es) valeur(s) indiquûˋe(s) dans le tableau ci-dessous.
|
Nô¯ de borne (symbole) | Couleur du cûÂblage |
Description de la borne | Condition |
Condition spûˋcifiûˋe |
|---|---|---|---|---|
|
F26-1 (IG) - F26-30 (E) |
L - W-B | Signal de source d'alimentation ûˋlectrique IG |
Contacteur d'alimentation en position OFF |
En dessous de 1 V |
|
Contacteur d'alimentation en position ON (IG) |
11 û 14 V | |||
|
F26-30 (E) - Masse de carrosserie |
W-B - Masse de carrosserie |
Masse | En permanence |
En dessous de 1 öˋ |
(c) Rebrancher le connecteur F26 d'ensemble d'ECU d'avertissement de distance.
(d) Mesurer la tension et vûˋrifier les impulsions en fonction de la (des) valeur(s) indiquûˋe(s) dans le tableau ci-dessous.
|
Nô¯ de borne (symbole) | Couleur du cûÂblage |
Description de la borne | Condition |
Condition spûˋcifiûˋe |
|---|---|---|---|---|
|
F26-2 (CSB1) - F26-30 (E) |
V - W-B | Circuit d'alimentation ûˋlectrique du capteur latûˋral avant |
Contacteur d'alimentation en position OFF |
En dessous de 1 V |
| 11 û 14 V | |||
|
F26-4 (BOF) - F26-30 (E) |
BE - W-B | Circuit d'alimentation ûˋlectrique du capteur avant |
Contacteur d'alimentation en position OFF |
En dessous de 1 V |
| 11 û 14 V | |||
|
F26-5 (CSG1) - F26-30 (E) |
V - W-B | Masse pour le sonar de dûˋtection de distance latûˋral avant |
En permanence | En dessous de 1 V |
|
F26-6 (E5) - F26-30 (E) |
GR - W-B | Masse pour le sonar de dûˋtection de distance avant |
En permanence | En dessous de 1 V |
|
F26-7 (LIN1) - F26-30 (E) |
B - W-B | Signal de communication de capteur latûˋral avant (capteur de sonar de dûˋtection de distance latûˋral avant) |
| Gûˋnûˋration d'impulsions (Se reporter û la forme d'onde 3) |
|
F26-8 (SOF) - F26-30 (E) |
G - W-B | Signal de communication du capteur avant (capteur du sonar de dûˋtection de distance avant) |
| Gûˋnûˋration d'impulsions (Se reporter û la forme d'onde 1) |
|
F26-13 (EF) - F26-30 (E) |
P - W-B | Masse pour le signal sonore d'avertissement de distance |
En permanence | En dessous de 1 V |
|
F26-14 (CBZ) - F26-13 (EF) |
SB - P | Signal de l'avertisseur sonore de distance |
Le signal sonore retentit |
Gûˋnûˋration d'impulsions (Se reporter û la forme d'onde 2) |
|
F26-15 (BBZ) - F26-16 (ER) |
L - B | Signal de l'avertisseur sonore de distance |
Le signal sonore retentit |
Gûˋnûˋration d'impulsions (Se reporter û la forme d'onde 2) |
|
F26-16 (ER) - F26-30 (E) |
B - W-B | Masse pour le signal sonore d'avertissement de distance |
En permanence | En dessous de 1 V |
|
F26-21 (CSB2) - F26-30 (E) |
L - W-B | Circuit d'alimentation ûˋlectrique du capteur latûˋral arriû´re |
Contacteur d'alimentation en position OFF |
En dessous de 1 V |
| 11 û 14 V | |||
|
F26-22 (BOR) - F26-30 (E) |
LG - W-B | Circuit d'alimentation ûˋlectrique du capteur arriû´re |
Contacteur d'alimentation en position OFF |
En dessous de 1 V |
| 11 û 14 V | |||
|
F26-23 (E1) - F26-30 (E) |
SB - W-B | Masse pour le sonar de dûˋtection de distance arriû´re |
En permanence | En dessous de 1 V |
|
F26-24 (SOR) - F26-30 (E) |
P - W-B | Signal de communication du capteur arriû´re (capteur de sonar de dûˋtection de distance arriû´re) |
| Gûˋnûˋration d'impulsions (Se reporter û la forme d'onde 1) |
|
F26-25 (CSG2) - F26-30 (E) |
BE - W-B | Masse pour le sonar de dûˋtection de distance latûˋral arriû´re |
En permanence | En dessous de 1 V |
|
F26-26 (LIN2) - F26-30 (E) |
R - W-B | Signal de communication de capteur latûˋral arriû´re (capteur de sonar de dûˋtection de distance latûˋral arriû´re) |
| Gûˋnûˋration d'impulsions (Se reporter û la forme d'onde 3) |
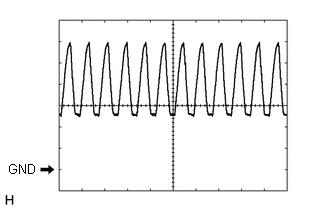
(e) Vûˋrifier la forme d'onde 1 û l'aide d'un oscilloscope.
(1) Forme d'onde 1 (rûˋfûˋrence)
|
Elûˋment | Contenu |
|---|---|
|
Borne de mesure |
|
| Rûˋglage de la mesure |
5 V/DIV., 1 ms/DIV. |
|
Condition |
|
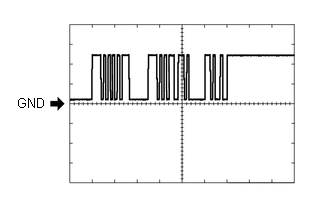
(f) Vûˋrifier la forme d'onde 2 û l'aide d'un oscilloscope.
(1) Forme d'onde 2 (rûˋfûˋrence)
|
Elûˋment | Contenu |
|---|---|
|
Borne de mesure |
|
| Rûˋglage de la mesure |
2 V/DIV., 500 ôçs./DIV. |
|
Condition | Le signal sonore retentit |
CONSEIL:
L'amplitude de la forme d'onde varie en fonction du rûˋglage du volume.
(g) Vûˋrifier la forme d'onde 3 û l'aide d'un oscilloscope.
(1) Forme d'onde 3 (rûˋfûˋrence)
|
Elûˋment | Contenu |
|---|---|
|
Borne de mesure |
|
| Rûˋglage de la mesure |
5 V/DIV., 1 ms/DIV. |
|
Condition |
|
 Tableau Des Symptomes De Problemes
Tableau Des Symptomes De Problemes
TABLEAU DES SYMPTOMES DE PROBLEMES
CONSEIL:
Utiliser le tableau ci-dessous pour dûˋterminer la cause des symptûÇmes du
problû´me. Si plusieurs zones incriminûˋes sont ûˋnumûˋrûˋes, les causes ...
 Systeme De Diagnostic
Systeme De Diagnostic
SYSTEME DE DIAGNOSTIC DESCRIPTION (a)
Lors de la recherche de pannes sur un vûˋhicule û l'aide d'un systû´me de
diagnostic, la seule diffûˋrence par rapport û la procûˋdure de recherche
de pan ...
D'autres materiaux:
Verification Sur Vehicule
VERIFICATION SUR VEHICULE PROCEDURE
1. VERIFIER L'ENSEMBLE DE CONDENSEUR DE REFROIDISSEUR (a)
Si les ailettes de l'ensemble de condenseur de refroidisseur sont
sales, les nettoyer û l'eau et les sûˋcher û l'air comprimûˋ. REMARQUE:
Ne pas endommager les ailettes de l'ensemble de condenseur ...
Schema Du Systeme
SCHEMA DU SYSTEME
Tableau de communication
ECU d'ûˋmission (Emetteur)
ECU de rûˋception Signal
Mûˋthode de communication
Ensemble d'ECU d'airbag
ECU de dûˋtection d'occupant
Signal de dûˋtection de collision
Signal d'accûˋlûˋration
CA ...
Verification
VERIFICATION PROCEDURE 1. VERIFIER L'ENSEMBLE DE SANGLE EXTERIEURE DE CEINTURE DE SECURITE ARRIERE DE TYPE A 3 POINTS
(a)
Avant de reposer l'ensemble de sangle extûˋrieure de ceinture de
sûˋcuritûˋ arriû´re de type û 3 points, vûˋrifier la fonction ELR. REMARQUE:
Ne pas dûˋmonter l'enr ...