Manuel de rÃĐparation de la Toyota Prius 2018: Perte de la communication avec le module du portail d'accÃĻs (U1002)
DESCRIPTION
Ce DTC est enregistrÃĐ lorsque l'ensemble d'ECU d'aide à la conduite ne reçoit pas les signaux de la camÃĐra de reconnaissance de marche avant ou de l'ensemble de capteur radar à ondes millimÃĐtriques.
|
N° de DTC | Objet de la dÃĐtection |
Condition de dÃĐtection du DTC |
Organe incriminÃĐ |
|---|---|---|---|
|
U1002 | Perte de la communication avec le module du portail d'accÃĻs |
AprÃĻs le contacteur d'alimentation est mis en position ON, la communication entre l'ECU d'aide à la conduite et l'une des piÃĻces constitutives suivantes est anormale pendant 2 secondes au moins.
|
|
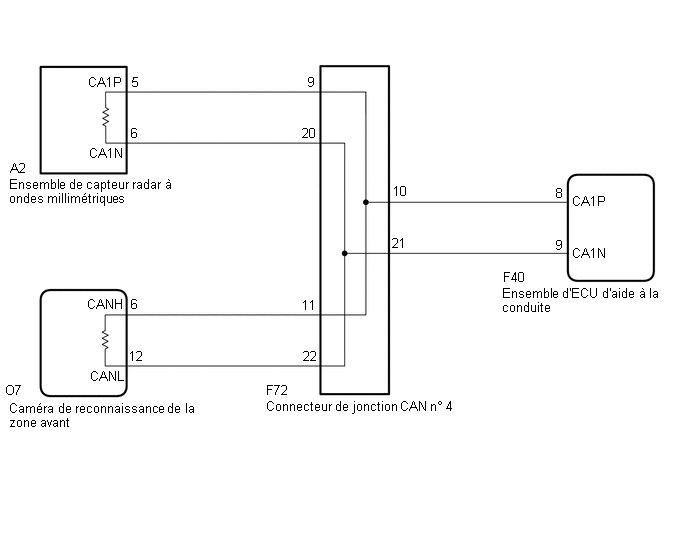
SCHEMA DE CABLAGE
MESURE DE PRECAUTION / REMARQUE / CONSEIL
REMARQUE:
- Avant de mesurer la rÃĐsistance du bus CAN, mettre le contacteur d'alimentation en position OFF et laisser le vÃĐhicule à l'arrÊt pendant un minimum de 1 minute sans utiliser la clÃĐ ou les contacteurs, ni ouvrir ou fermer les portes. Ensuite, dÃĐbrancher le cÃĒble de la borne nÃĐgative (-) de la batterie auxiliaire et laisser le vÃĐhicule à l'arrÊt pendant un minimum de 1 minute avant de mesurer la rÃĐsistance.
- AprÃĻs avoir mis le contacteur d'alimentation en position OFF, un dÃĐlai
d'attente avant de dÃĐbrancher le cÃĒble de la borne nÃĐgative (-) de la
batterie peut Être requis. Par consÃĐquent, veiller à lire les mesures de
prÃĐcaution concernant le dÃĐbranchement du cÃĒble de la borne nÃĐgative
(-) de la batterie auxiliaire avant de poursuivre le travail.
Cliquer ici

- En cas de remplacement de l'ensemble de capteur radar à ondes millimÃĐtriques, toujours le remplacer par un ÃĐlÃĐment neuf. Si un ensemble de capteur radar à ondes millimÃĐtriques qui a ÃĐtÃĐ posÃĐ dans un autre vÃĐhicule est utilisÃĐ, les informations enregistrÃĐes dans l'ensemble de capteur radar à ondes millimÃĐtriques ne correspondront pas aux informations du vÃĐhicule. Par consÃĐquent, il se peut qu'un DTC soit enregistrÃĐ.
- Lorsque l'ensemble de capteur radar à ondes millimÃĐtriques est remplacÃĐ
par un ÃĐlÃĐment neuf, il faut rÃĐgler l'axe du faisceau du capteur radar.
Cliquer ici
- Lors du remplacement de la camÃĐra de reconnaissance de marche avant, toujours la remplacer par un ÃĐlÃĐment neuf. Si une camÃĐra de reconnaissance de marche avant prÃĐcÃĐdemment posÃĐe sur un autre vÃĐhicule est utilisÃĐe, les informations enregistrÃĐes dans la camÃĐra de reconnaissance de marche avant ne correspondront pas aux informations du vÃĐhicule. Par consÃĐquent, il se peut qu'un DTC soit enregistrÃĐ.
- Si la camÃĐra de reconnaissance de la zone avant a ÃĐtÃĐ remplacÃĐe par un
ÃĐlÃĐment neuf, veiller à effectuer un apprentissage de camÃĐra de
reconnaissance de la zone avant.
Cliquer ici
CONSEIL:
- Actionner le contacteur d'alimentation, un autre contacteur ou une porte dÃĐclenche la mise en communication de l'ECU et du capteur correspondant sur le CAN. Cette communication entraÃŪne une modification de la valeur ohmique.
- MÊme aprÃĻs effacement des DTC, si un DTC est à nouveau enregistrÃĐ aprÃĻs avoir conduit le vÃĐhicule pendant un moment, il se peut que le dysfonctionnement soit dÃŧ aux vibrations du vÃĐhicule. Dans ce cas, le fait d'agiter les ECU et faisceaux de cÃĒbles au cours de la vÃĐrification ci-dessous peut aider à identifier la cause du problÃĻme.
PROCEDURE
|
1. | VERIFIER LA LIGNE DE BUS CAN (CONFIRMATION DE DYSFONCTIONNEMENT) |
(a) Mettre le contacteur d'alimentation en position OFF.
(b) DÃĐbrancher le cÃĒble de la borne nÃĐgative (-) de la batterie auxiliaire.
| (c) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous. RÃĐsistance standard:
|
|
RÃĐsultat:
|
RÃĐsultat | Passer au point |
|---|---|
|
OK | A |
|
NG (coupure de circuit dans la ligne principale ou une ligne secondaire de l'ensemble d'ECU d'aide à la conduite |
B |
| NG (court-circuit entre les lignes principales) |
C |
| NG (court-circuit en +B ou à la masse) |
D |
| B |
 |
PASSER AU POINT 3 |
| C |
|
PASSER AU POINT 8 |
| D |
|
PASSER AU POINT 12 |
|

| 2. |
RECHERCHER DES DTC (SYSTEME DE SECURITE PREVENTIVE) |
(a) Supprimer les DTC.
Cliquer ici
(b) ExÃĐcuter la procÃĐdure suivante.
CONSEIL:
Si la procÃĐdure suivante n'est pas effectuÃĐe, les DTC prÃĐcÃĐdemment ÃĐmis ne peuvent pas Être dÃĐtectÃĐs.
- Mettre le contacteur d'alimentation en position ON (IG) et attendre 2 secondes minimum.
(c) VÃĐrifier les DTC.
Cliquer ici
RÃĐsultat:
|
RÃĐsultat | Passer au point |
|---|---|
|
Le DTC U1002 n'est pas ÃĐmis |
A |
| Le DTC U1002 est ÃĐmis |
B |
| A |
|
UTILISER LA METHODE DE SIMULATION POUR EFFECTUER LA VERIFICATION |
| B |
|
REMPLACER L'ENSEMBLE D'ECU D'AIDE A LA CONDUITE |
| 3. |
RECHERCHER UNE EVENTUELLE COUPURE DE CIRCUIT DANS LES LIGNES SECONDAIRES DE BUS CAN (ENSEMBLE D'ECU D'AIDE A LA CONDUITE) |
| (a) DÃĐbrancher le connecteur F40 de l'ensemble d'ECU d'aide à la conduite. |
|
(b) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester | Condition |
Condition spÃĐcifiÃĐe |
|---|---|---|
|
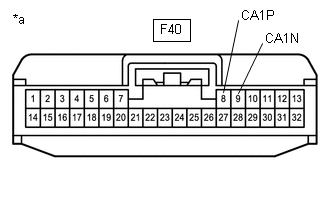
F40-8 (CA1P) - F40-9 (CA1N) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
108 Ã 132 ÎĐ |
CONSEIL:
Si la rÃĐsistance est comprise entre 108 et 132 ÎĐ, il se peut qu'il y ait une coupure dans la ligne principale de bus CAN. Si la valeur est de 132 ÎĐ minimum, il se peut qu'il y ait une coupure de circuit dans une ligne secondaire de bus CAN entre le connecteur de jonction CAN n° 4 et l'ECU d'aide à la conduite ou un connecteur peut Être dÃĐbranchÃĐ.
(c) Brancher le connecteur F40 de l'ensemble d'ECU d'aide à la conduite.
| INCORRECT |
|
PASSER AU POINT 7 |
|
| 4. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LES LIGNES PRINCIPALES DE BUS CAN (CONNECTEUR DE JONCTION CAN N° 4) |
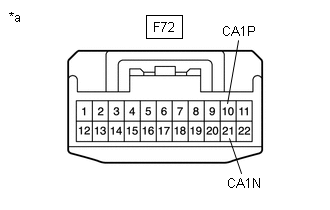
| (a) DÃĐbrancher le connecteur F72 du connecteur de jonction CAN n° 4. |
|
(b) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester | Condition |
Condition spÃĐcifiÃĐe | Raccorde à |
|---|---|---|---|
|
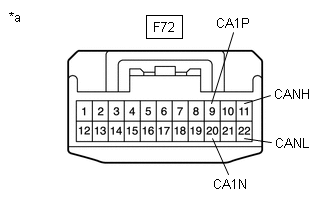
F72-11 (CANH) - F72-22 (CANL) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
108 Ã 132 ÎĐ | CamÃĐra de reconnaissance de la zone avant |
|
F72-9 (CA1P) - F72-20 (CA1N) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
108 à 132 ÎĐ | Ensemble de capteur radar à ondes millimÃĐtriques |
(c) Brancher le connecteur F72 de jonction CAN n° 4.
RÃĐsultat:
|
RÃĐsultat | Passer au point |
|---|---|
|
OK | A |
|
NG (ligne principale de la camÃĐra de reconnaissance de marche avant) |
B |
| NG (ligne principale de l'ensemble de capteur radar à ondes millimÃĐtriques) |
C |
| A |
|
REMPLACER LE CONNECTEUR DE JONCTION CAN N° 4 |
| C |
|
PASSER AU POINT 6 |
|
| 5. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LES LIGNES PRINCIPALES DE BUS CAN (CAMERA DE RECONNAISSANCE DE MARCHE AVANT) |
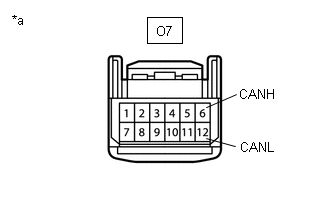
| (a) DÃĐbrancher le connecteur O7 de camÃĐra de reconnaissance de marche avant. |
|
(b) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester | Condition |
Condition spÃĐcifiÃĐe |
|---|---|---|
|
O7-6 (CANH) - O7-12 (CANL) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
108 Ã 132 ÎĐ |
(c) Brancher le connecteur O7 de camÃĐra de reconnaissance de marche avant.
| OK |
|
REMPLACER LA CAMERA DE RECONNAISSANCE DE MARCHE AVANT |
| INCORRECT |
|
REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN N° 4 - CAMERA DE RECONNAISSANCE DE MARCHE AVANT) |
|
6. | RECHERCHER UNE EVENTUELLE COUPURE DANS LES LIGNES PRINCIPALES DE BUS CAN (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
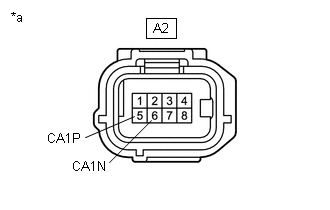
| (a) DÃĐbrancher le connecteur A2 de l'ensemble de capteur radar à ondes millimÃĐtriques. |
|
(b) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester | Condition |
Condition spÃĐcifiÃĐe |
|---|---|---|
|
A2-5 (CA1P) - A2-6 (CA1N) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
108 Ã 132 ÎĐ |
(c) Brancher le connecteur A2 de l'ensemble de capteur radar à ondes millimÃĐtriques.
| OK |
|
REMPLACER L'ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES |
| INCORRECT |
|
REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN N° 4 - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
|
7. | RECHERCHER UNE EVENTUELLE COUPURE DE CIRCUIT DANS LES LIGNES SECONDAIRES DE BUS CAN (ENSEMBLE D'ECU D'AIDE A LA CONDUITE) |
| (a) DÃĐbrancher le connecteur F40 de l'ensemble d'ECU d'aide à la conduite. |
|
| (b) DÃĐbrancher le connecteur F72 du connecteur de jonction CAN n° 4. |
|
(c) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester | Condition |
Condition spÃĐcifiÃĐe |
|---|---|---|
|
F72-10 (CA1P) - F40-8 (CA1P) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
En dessous de 1 ÎĐ |
|
F72-21 (CA1N) - F40-9 (CA1N) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
En dessous de 1 ÎĐ |
(d) Brancher le connecteur F72 de jonction CAN n° 4.
(e) Brancher le connecteur F40 de l'ensemble d'ECU d'aide à la conduite.
| OK |
|
REMPLACER LE CONNECTEUR DE JONCTION CAN N° 4 |
| INCORRECT |
|
REPARER OU REMPLACER LE CABLE SECONDAIRE DE BUS CAN (CONNECTEUR DE JONCTION CAN N° 4 - ENSEMBLE D'ECU D'AIDE A LA CONDUITE) |
| 8. |
RECHERCHER UN COURT-CIRCUIT ENTRE LES LIGNES DU BUS CAN (CAMERA DE RECONNAISSANCE DE MARCHE AVANT) |
| (a) DÃĐbrancher le connecteur O7 de camÃĐra de reconnaissance de marche avant. |
|
(b) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester | Condition |
Condition spÃĐcifiÃĐe |
|---|---|---|
|
O7-6 (CANH) - O7-12 (CANL) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
108 Ã 132 ÎĐ |
(c) Brancher le connecteur O7 de camÃĐra de reconnaissance de marche avant.
| OK |
|
REMPLACER LA CAMERA DE RECONNAISSANCE DE MARCHE AVANT |
|
| 9. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (CONNECTEUR DE JONCTION CAN N° 4) |
| (a) DÃĐbrancher le connecteur F72 du connecteur de jonction CAN n° 4. |
|
(b) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester | Condition |
Condition spÃĐcifiÃĐe | Raccorde à |
|---|---|---|---|
|
F72-11 (CANH) - F72-22 (CANL) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
108 Ã 132 ÎĐ | CamÃĐra de reconnaissance de la zone avant |
|
F72-9 (CA1P) - F72-20 (CA1N) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
108 à 132 ÎĐ | Ensemble de capteur radar à ondes millimÃĐtriques |
|
F72-10 (CA1P) - F72-21 (CA1N) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
200 ÎĐ minimum | Ensemble d'ECU d'aide à la conduite |
(c) Brancher le connecteur F72 de jonction CAN n° 4.
RÃĐsultat:
|
RÃĐsultat | Passer au point |
|---|---|
|
OK | A |
|
Ligne principale de la camÃĐra de reconnaissance de marche avant) |
B |
| NG (ligne principale de l'ensemble de capteur radar à ondes millimÃĐtriques) |
C |
| NG (ligne secondaire d'ensemble d'ECU d'aide à la conduit ) |
D |
| A |
|
REMPLACER LE CONNECTEUR DE JONCTION CAN N° 4 |
| B |
|
REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN N° 4 - CAMERA DE RECONNAISSANCE DE MARCHE AVANT) |
| D |
|
PASSER AU POINT 11 |
|
| 10. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES LIGNES DE BUS CAN (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
| (a) DÃĐbrancher le connecteur A2 de l'ensemble de capteur radar à ondes millimÃĐtriques. |
|
(b) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester | Condition |
Condition spÃĐcifiÃĐe |
|---|---|---|
|
A2-5 (CA1P) - A2-6 (CA1N) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
108 Ã 132 ÎĐ |
(c) Brancher le connecteur A2 de l'ensemble de capteur radar à ondes millimÃĐtriques.
| OK |
|
REMPLACER L'ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES |
| INCORRECT |
|
REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN N° 4 - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
|
11. | RECHERCHER UN COURT-CIRCUIT ENTRE LES LIGNES DE BUS CAN (ENSEMBLE D'ECU D'AIDE A LA CONDUITE) |
| (a) DÃĐbrancher le connecteur F40 de l'ensemble d'ECU d'aide à la conduite. |
|
(b) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester | Condition |
Condition spÃĐcifiÃĐe |
|---|---|---|
|
F40-8 (CA1P) - F40-9 (CA1N) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
54 Ã 69 ÎĐ |
(c) Brancher le connecteur F40 de l'ensemble d'ECU d'aide à la conduite.
| OK |
|
REMPLACER L'ENSEMBLE D'ECU D'AIDE A LA CONDUITE |
| INCORRECT |
|
REPARER OU REMPLACER LA LIGNE SECONDAIRE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN N° 4 - ENSEMBLE D'ECU D'AIDE A LA CONDUITE) |
| 12. |
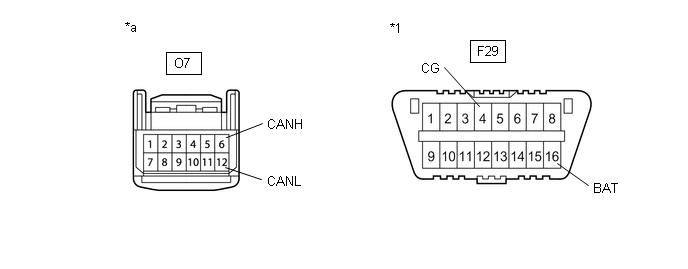
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LA LIGNE DE BUS CAN (CAMERA DE RECONNAISSANCE DE MARCHE AVANT) |
(a) DÃĐbrancher le connecteur O7 de camÃĐra de reconnaissance de marche avant.
|
*1 | DLC3 |
- | - |
|
*a | Vue avant du connecteur cÃītÃĐ faisceau de cÃĒbles (vers la camÃĐra de reconnaissance de marche avant) |
- | - |
(b) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester | Condition |
Condition spÃĐcifiÃĐe |
|---|---|---|
|
O7-6 (CANH) - F29-4 (CG) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
200 ÎĐ minimum |
|
O7-12 (CANL) - F29-4 (CG) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
200 ÎĐ minimum |
|
O7-6 (CANH) - F29-16 (BAT) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
6 kÎĐ minimum |
|
O7-12 (CANL) - F29-16 (BAT) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
6 kÎĐ minimum |
(c) Brancher le connecteur O7 de camÃĐra de reconnaissance de marche avant.
| OK |
|
REMPLACER LA CAMERA DE RECONNAISSANCE DE MARCHE AVANT |
|
| 13. |
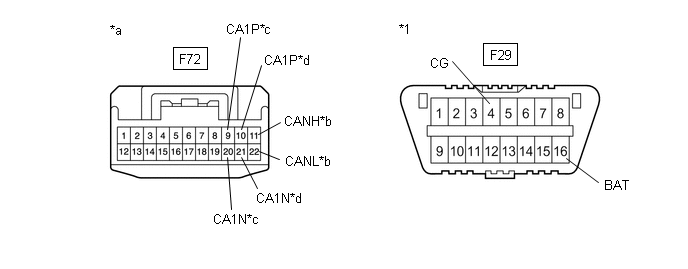
RECHERCHER UN COURT-CIRCUIT EVENTUEL DANS LA LIGNE DE BUS CAN (CONNECTEUR DE JONCTION CAN N° 4) |
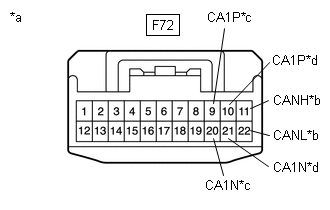
(a) DÃĐbrancher le connecteur F72 du connecteur de jonction CAN n° 4.
|
*1 | DLC3 |
- | - |
|
*a | Vue avant du connecteur cÃītÃĐ faisceau de cÃĒbles (vers le connecteur de jonction CAN n° 4) |
*b | vers la camÃĐra de reconnaissance de marche avant |
|
*c | vers l'ensemble de capteur radar à ondes millimÃĐtriques |
*d | vers l'ensemble d'ECU d'aide à la conduite |
(b) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester | Condition |
Condition spÃĐcifiÃĐe | Raccorde à |
|---|---|---|---|
|
F72-11 (CANH) - F29-4 (CG) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
200 ÎĐ minimum |
CamÃĐra de reconnaissance de la zone avant |
|
F72-22 (CANL) - F29-4 (CG) | |||
|
F72-11 (CANH) - F29-16 (BAT) |
6 kÎĐ minimum | ||
|
F72-22 (CANL) - F29-16 (BAT) | |||
|
F72-9 (CA1P) - F29-4 (CG) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
200 ÎĐ minimum |
Ensemble de capteur radar à ondes millimÃĐtriques |
|
F72-20 (CA1N) - F29-4 (CG) | |||
|
F72-9 (CA1P) - F29-16 (BAT) |
6 kÎĐ minimum | ||
|
F72-20 (CA1N) - F29-16 (BAT) | |||
|
F72-10 (CA1P) - F29-4 (CG) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
200 ÎĐ minimum |
Ensemble d'ECU d'aide à la conduite |
|
F72-21 (CA1N) - F29-4 (CG) | |||
|
F72-10 (CA1P) - F29-16 (BAT) |
6 kÎĐ minimum | ||
|
F72-21 (CA1N) - F29-16 (BAT) |
(c) Brancher le connecteur F72 de jonction CAN n° 4.
RÃĐsultat:
|
RÃĐsultat | Passer au point |
|---|---|
|
OK | A |
|
Ligne principale de la camÃĐra de reconnaissance de marche avant) |
B |
| NG (ligne principale de l'ensemble de capteur radar à ondes millimÃĐtriques) |
C |
| NG (ligne secondaire d'ensemble d'ECU d'aide à la conduit ) |
D |
| A |
|
REMPLACER LE CONNECTEUR DE JONCTION CAN N° 4 |
| B |
|
REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN N° 4 - CAMERA DE RECONNAISSANCE DE MARCHE AVANT) |
| D |
|
PASSER AU POINT 15 |
|
| 14. |
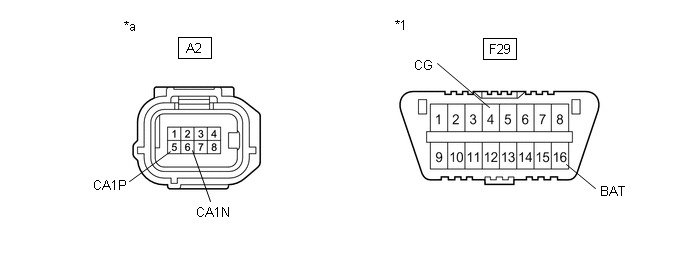
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LA LIGNE DE BUS CAN (ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
(a) DÃĐbrancher le connecteur A2 de l'ensemble de capteur radar à ondes millimÃĐtriques.
|
*1 | DLC3 |
- | - |
|
*a | Vue avant du connecteur cÃītÃĐ faisceau de cÃĒbles (vers l'ensemble de capteur radar à ondes millimÃĐtriques) |
- | - |
(b) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester | Condition |
Condition spÃĐcifiÃĐe |
|---|---|---|
|
A2-5 (CA1P) - F29-4 (CG) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
200 ÎĐ minimum |
|
A2-6 (CA1N) - F29-4 (CG) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
200 ÎĐ minimum |
|
A2-5 (CA1P) - F29-16 (BAT) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
6 kÎĐ minimum |
|
A2-6 (CA1N) - F29-16 (BAT) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
6 kÎĐ minimum |
(c) Brancher le connecteur A2 de l'ensemble de capteur radar à ondes millimÃĐtriques.
| OK |
|
REMPLACER L'ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES |
| INCORRECT |
|
REPARER OU REMPLACER LA LIGNE PRINCIPALE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN N° 4 - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
|
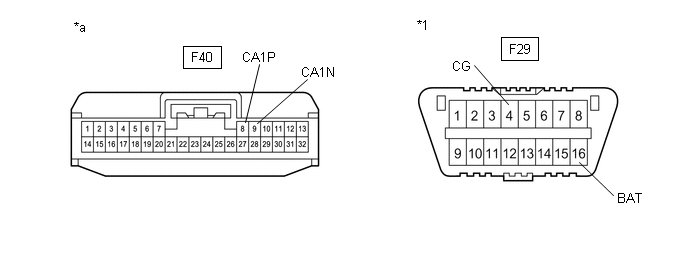
15. | RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LA LIGNE DE BUS CAN (ENSEMBLE D'ECU D'AIDE A LA CONDUITE) |
(a) DÃĐbrancher le connecteur F40 de l'ensemble d'ECU d'aide à la conduite.
|
*1 | DLC3 |
- | - |
|
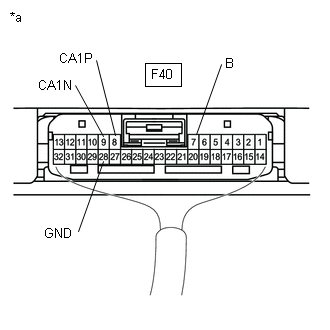
*a | Vue avant du connecteur cÃītÃĐ faisceau de cÃĒbles (vers l'ensemble d'ECU d'aide à la conduite) |
- | - |
(b) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester | Condition |
Condition spÃĐcifiÃĐe |
|---|---|---|
|
F40-8 (CA1P) - F29-4 (CG) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
200 ÎĐ minimum |
|
F40-9 (CA1N) - F29-4 (CG) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
200 ÎĐ minimum |
|
F40-8 (CA1P) - F29-16 (BAT) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
6 kÎĐ minimum |
|
F40-9 (CA1N) - F29-16 (BAT) |
CÃĒble dÃĐbranchÃĐ de la borne nÃĐgative (-) de la batterie auxiliaire |
6 kÎĐ minimum |
(c) Brancher le connecteur F40 de l'ensemble d'ECU d'aide à la conduite.
| OK |
|
REMPLACER L'ENSEMBLE D'ECU D'AIDE A LA CONDUITE |
| INCORRECT |
|
REPARER OU REMPLACER LA LIGNE SECONDAIRE DE BUS CAN OU LE CONNECTEUR (CONNECTEUR DE JONCTION CAN N° 4 - ENSEMBLE D'ECU D'AIDE A LA CONDUITE) |
 Perte de la communication avec l'ECU d'aide à la conduite (U1104)
Perte de la communication avec l'ECU d'aide à la conduite (U1104)
DESCRIPTION L'ensemble
d'ECU d'aide à la conduite est branchÃĐ sur l'ensemble de capteur radar Ã
ondes millimÃĐtriques, la camÃĐra de reconnaissance de marche avant et
l'ECU de contrÃīle de dà ...
 Perte de communication avec le module de camÃĐra avant (U023A)
Perte de communication avec le module de camÃĐra avant (U023A)
DESCRIPTION
N° de DTC Objet de la dÃĐtection
Condition de dÃĐtection du DTC
Organe incriminÃĐ
U023A Perte de communication avec le module de camÃĐra avant
Lorsque
...
D'autres materiaux:
Perte de communication avec le module du capteur d'embardÃĐe (U0125,U0126,U0129,U0293,U1104)
DESCRIPTION L'ensemble d'ECU d'aide à la conduite communique avec chaque capteur et l'ECU via la communication CAN.
Si
un dysfonctionnement est dÃĐtectÃĐ dans le circuit de communication CAN,
un ou plusieurs DTC du systÃĻme de communication CAN sont alors
enregistrÃĐs.
N° de DTC ...
Tension du capteur de tension d'inverseur de moteur d'entraÃŪnement "A" en dehors de la plage admise (P0D2D1C)
RESUME DES DTC DESCRIPTION DU DYSFONCTIONNEMENT
L'ECU de commande de vÃĐhicule hybride dÃĐtecte un dysfonctionnement du capteur VH.
La cause de ce dysfonctionnement peut Être l'un des points suivants: Dysfonctionnement du circuit interne du capteur de tension d'inverseur
Dysfonctionnement ...
Comment Utiliser La Recherche De Pannes
MESURE DE PRECAUTION / REMARQUE / CONSEIL
CONSEIL:
Suivre la procÃĐdure suivante pour effectuer la recherche de pannes du systÃĻme de verrouillage centralisÃĐ des portes.
*: Utiliser le Techstream.
PROCEDURE
1. VEHICULE AMENE A L'ATELIER
SUIVANT
...