Manuel de rÃĐparation de la Toyota Prius 2018: Description Du Systeme
DESCRIPTION DU SYSTEME
DESCRIPTION SUCCINCTE
(a) Le rÃĐseau local de commande (CAN) est un systÃĻme de communication de donnÃĐes sÃĐrielle pour application en temps rÃĐel. C'est un systÃĻme de communication multiplex pour vÃĐhicule dotÃĐ d'une vitesse de communication ÃĐlevÃĐe et d'une fonction de dÃĐtection des dysfonctionnements.
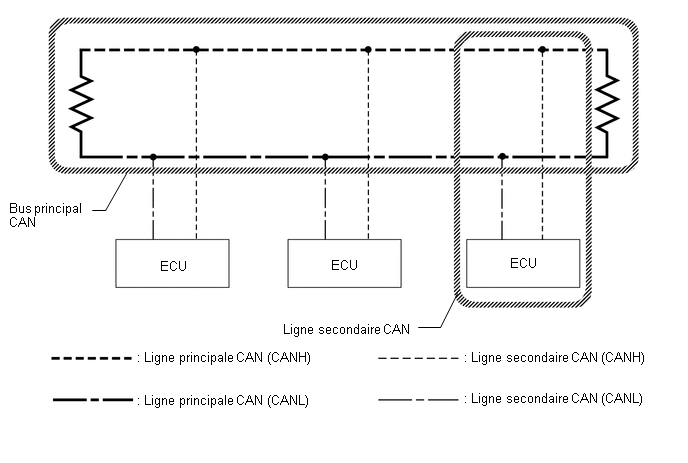
(b) En utilisant les lignes de bus CANH et CANL de paire, la communication CAN est ÃĐtablie à l'aide d'une tension diffÃĐrentielle. (Une tension de rÃĐfÃĐrence est appliquÃĐe à la paire de lignes et une tension diffÃĐrentielle est crÃĐÃĐe lors de la communication).
(c) De nombreux capteurs ou ECU ÃĐquipant le vÃĐhicule fonctionnent en partageant des informations et en communiquant entre eux.
(d) 2 rÃĐsistances qui sont nÃĐcessaires pour la communication sont utilisÃĐes dans une ligne principale de bus CAN.
DEFINITION DES TERMES
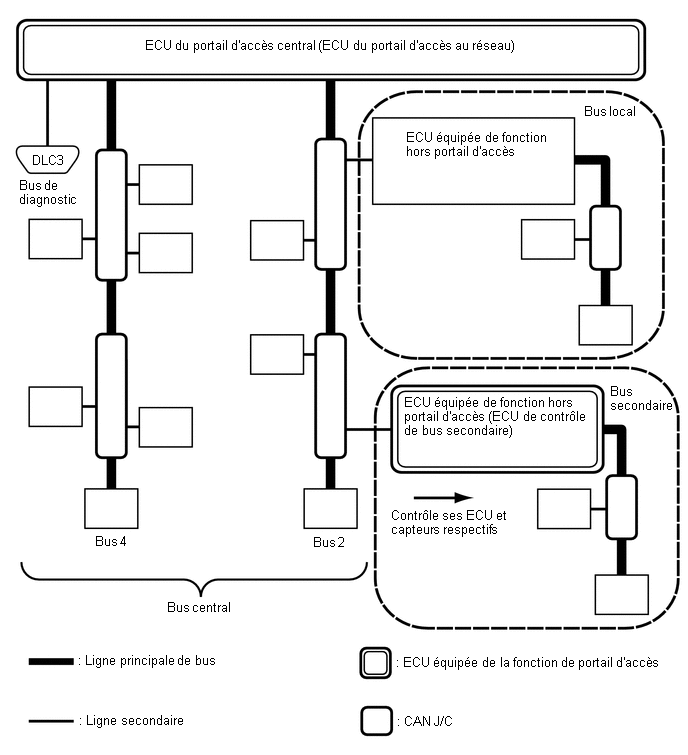
(a) Bus central
(1) Le bus central est un terme utilisÃĐ pour dÃĐcrire tous les bus directement connectÃĐs à l'ECU du portail d'accÃĻs central (ECU du portail d'accÃĻs au rÃĐseau).
CONSEIL:
Un bus s'affiche en tant que bus sur l'ÃĐcran "Communication Bus Check" du Techstream.
(b) Bus secondaire
(1) Un bus secondaire est un bus qui dispose d'une fonction de portail d'accÃĻs ÃĐquipÃĐ d'ECU afin de communiquer avec le bus central et les autres bus secondaires.
CONSEIL:
- Un bus secondaire s'affiche en tant que bus secondaire sur l'ÃĐcran "Communication Bus Check" du Techstream.
- Lorsque le bus secondaire est sÃĐlectionnÃĐ sur l'ÃĐcran "Communication Bus Check", les ECU et les capteurs branchÃĐs sur des rÃĐseaux autres que CAN comme les rÃĐseaux LIN peuvent ÃĐgalement s'afficher en plus des ECU et des capteurs branchÃĐs sur les bus secondaires du rÃĐseau CAN.
(c) Bus local
(1) Un bus local est un bus qui ne peut pas communiquer avec d'autres bus. Les ECU et les capteurs sur un bus local communiquent uniquement avec les autres ECU et capteurs dans le mÊme bus.
(d) CAN J/C
(1) Un connecteur de jonction CAN est un connecteur qui permet de raccorder les lignes secondaires sur un bus principal.
(e) Bus principal
(1) Une ligne de bus principal est le faisceau de cÃĒbles qui relie les 2 rÃĐsistances d'extrÃĐmitÃĐ d'un bus.
(f) Secondaire
(1) Une ligne de bus secondaire est un faisceau de cÃĒbles qui connecte l'ECU et le capteur à une ligne de bus principal.
(g) RÃĐsistances d'extrÃĐmitÃĐ
(1) Les rÃĐsistances d'extrÃĐmitÃĐ maintenant un signal stable dans le bus CAN sont posÃĐes. 2 rÃĐsistances de 120 ÎĐ situÃĐes à chaque extrÃĐmitÃĐ du bus sont nÃĐcessaires.
 Schema Du Systeme
Schema Du Systeme
SCHEMA DU SYSTEME (a) Le systÃĻme de communication CAN se compose de 5 bus.
*A avec systÃĻme de contrÃīle d'angle mort
*B pour batterie au lithium
Ligne du bus princ ...
 Comment Utiliser La Recherche De Pannes
Comment Utiliser La Recherche De Pannes
MESURE DE PRECAUTION / REMARQUE / CONSEIL MESURES DE PRECAUTION A SUIVRE LORS DE LA RECHERCHE DE PANNES
REMARQUE:
Parce que l'ordre de diagnostic est important pour permettre un bon
diagnostic ...
D'autres materiaux:
Mesures De Precaution
MESURES DE PRECAUTION MESURES DE PRECAUTION RELATIVES AU DEBRANCHEMENT DU CABLE DE LA BORNE NEGATIVE DE LA BATTERIE AUXILIAIRE
REMARQUE: Lors
du dÃĐbranchement du cÃĒble de la borne nÃĐgative (-) de la batterie
auxiliaire, initialiser les systÃĻmes suivants une fois le cÃĒble
rebranchÃĐ. ...
Code rÃĐgional du capteur radar avant non conforme (C1A0A)
DESCRIPTION L'ensemble
d'ECU d'aide à la conduite utilise l'ensemble de capteur radar à ondes
millimÃĐtriques pour dÃĐtecter les objets se trouvant devant le vÃĐhicule. Lorsque
les informations de destination de l'ensemble de capteur radar à ondes
millimÃĐtriques et de l'ensemble d'ECU d' ...
Circuit d'ÃĐclairage du chargeur sans fil
DESCRIPTION Lorsque le
contacteur de commande d'ÃĐclairage est mis en position TAIL ou HEAD, ce
circuit envoie un signal d'ÃĐclairage à l'ensemble de support de chargeur
à distance mobile. SCHEMA DE CABLAGE
MESURE DE PRECAUTION / REMARQUE / CONSEIL
REMARQUE: VÃĐrifier les fusibles pour ...