Manuel de rÃĐparation de la Toyota Prius 2018: Perte de la communication avec le capteur de distance avant du rÃĐgulateur de vitesse (U0235,U1104)
DESCRIPTION
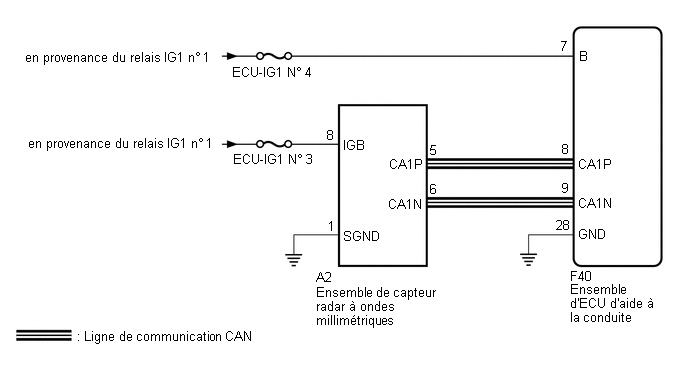
L'ensemble d'ECU d'aide à la conduite envoie les informations sur la vitesse et les conditions de fonctionnement du vÃĐhicule à l'ensemble de capteur radar à ondes millimÃĐtriques. L'ensemble de capteur radar à ondes millimÃĐtriques envoie ensuite des informations sur la prÃĐsence, la distance, et la vitesse relative des objets devant le vÃĐhicule à l'ensemble d'ECU d'aide à la conduite. L'ensemble d'ECU d'aide à la conduite envoie cette information à l'ensemble d'ECU de commande de vÃĐhicule hybride et l'ensemble d'ECU de commande de vÃĐhicule hybride active le systÃĻme de rÃĐgulateur de vitesse dynamique à radar.
|
N° de DTC | Objet de la dÃĐtection |
Condition de dÃĐtection du DTC |
Organe incriminÃĐ | MIL |
|---|---|---|---|---|
|
U0235 | Perte de la communication avec le capteur de distance avant du rÃĐgulateur de vitesse | sans fonction de suivi de plage à pleine vitesse:
|
| Ne s'active pas |
|
U1104 | Perte de la communication avec l'ECU d'aide à la conduite | sans fonction de suivi de plage à pleine vitesse:
|
| Ne s'active pas |
SCHEMA DE CABLAGE
MESURE DE PRECAUTION / REMARQUE / CONSEIL
REMARQUE:
- Lors du remplacement de l'ensemble d'ECU d'aide à la conduite, veiller à le remplacer par un ÃĐlÃĐment neuf. En cas d'utilisation d'un appareil ayant ÃĐtÃĐ installÃĐ sur un autre vÃĐhicule, les informations enregistrÃĐes dans l'ensemble d'ECU d'aide à la conduite ne correspondent pas aux informations du vÃĐhicule. Il se peut donc qu'un DTC soit enregistrÃĐ.
- Lorsque l'ensemble de capteur radar à ondes millimÃĐtriques est remplacÃĐ
par un ÃĐlÃĐment neuf, il faut rÃĐgler l'axe du faisceau du capteur radar.
Cliquer ici

PROCEDURE
|
1. | VERIFIER LE SYSTEME DE COMMUNICATION CAN |
(a) A l'aide du Techstream, vÃĐrifier si le systÃĻme de communication CAN fonctionne normalement.
Cliquer ici
RÃĐsultat:
|
RÃĐsultat | Passer au point |
|---|---|
|
Les DTC du systÃĻme de communication CAN ne sont pas ÃĐmis |
OK |
| Les DTC du systÃĻme de communication CAN sont ÃĐmis |
NG |
| INCORRECT |
 |
PASSER AU SYSTEME DE COMMUNICATION CAN |
|

|
2. | VERIFIER LE FAISCEAU DE CABLES ET LE CONNECTEUR (ENSEMBLE D'ECU D'AIDE A LA CONDUITE - BATTERIE AUXILIAIRE ET MASSE DE CARROSSERIE) |
(a) DÃĐbrancher le connecteur de l'ensemble d'ECU d'aide à la conduite.
(b) Mesurer la tension et la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester |
Condition | Condition spÃĐcifiÃĐe |
|---|---|---|
|
F40-28 (GND) - Masse de carrosserie |
En permanence | En dessous de 1 ÎĐ |
Tension standard:
|
Branchement du tester |
Position du contacteur |
Condition spÃĐcifiÃĐe |
|---|---|---|
|
F40-7 (B) - Masse de carrosserie |
Contacteur d'alimentation en position ON (IG) |
11 Ã 14 V |
|
F40-7 (B) - Masse de carrosserie |
Contacteur d'alimentation en position OFF |
En dessous de 1 V |
| INCORRECT |
|
REPARER OU REMPLACER LE FAISCEAU DE CABLES OU LE CONNECTEUR |
|
|
3. | VERIFIER LE FAISCEAU DE CABLES ET LE CONNECTEUR (EBSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES - BATTERIE AUXILIAIRE ET MASSE DE CARROSSERIE) |
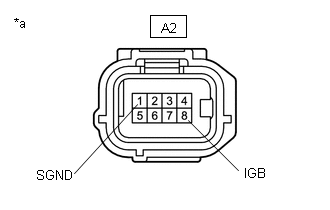
| (a) DÃĐbrancher le connecteur de l'ensemble de capteur radar à ondes millimÃĐtriques. |
|
(b) Mesurer la tension et la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester |
Condition | Condition spÃĐcifiÃĐe |
|---|---|---|
|
A2-1 (SGND) - Masse de carrosserie |
En permanence | En dessous de 1 ÎĐ |
Tension standard:
|
Branchement du tester |
Position du contacteur |
Condition spÃĐcifiÃĐe |
|---|---|---|
|
A2-8 (IGB) - Masse de carrosserie |
Contacteur d'alimentation en position ON (IG) |
11 Ã 14 V |
|
A2-8 (IGB) - Masse de carrosserie |
Contacteur d'alimentation en position OFF |
En dessous de 1 V |
| INCORRECT |
|
REPARER OU REMPLACER LE FAISCEAU DE CABLES OU LE CONNECTEUR |
|
|
4. | VERIFIER LE FAISCEAU DE CABLES ET LE CONNECTEUR (ENSEMBLE D'ECU D'AIDE A LA CONDUITE - ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES) |
(a) DÃĐbrancher le connecteur F40 de l'ensemble d'ECU d'aide à la conduite.
(b) DÃĐbrancher le connecteur A2 de l'ensemble de capteur radar à ondes millimÃĐtriques.
(c) DÃĐbrancher le connecteur de camÃĐra de reconnaissance de marche avant.
(d) Mesurer la rÃĐsistance en fonction de la (des) valeur(s) indiquÃĐe(s) dans le tableau ci-dessous.
RÃĐsistance standard:
|
Branchement du tester |
Condition | Condition spÃĐcifiÃĐe |
|---|---|---|
|
F40-8 (CA1P) - A2-5 (CA1P) |
En permanence | En dessous de 1 ÎĐ |
|
F40-9 (CA1N) - A2-6 (CA1N) |
En permanence | En dessous de 1 ÎĐ |
|
F40-8 (CA1P) ou A2-5 (CA1P) - Masse de carrosserie |
En permanence | 10 kÎĐ minimum |
|
F40-9 (CA1N) ou A2-6 (CA1N) - Masse de carrosserie |
En permanence | 10 kÎĐ minimum |
| INCORRECT |
|
REPARER OU REMPLACER LE FAISCEAU DE CABLES OU LE CONNECTEUR |
|
|
5. | REMPLACER L'ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES |
(a) Remplacer l'ensemble de capteur radar à ondes millimÃĐtriques par un ÃĐlÃĐment neuf.
Cliquer ici
(b) Effectuer le rÃĐglage de l'ensemble de capteur radar à ondes millimÃĐtriques.
Cliquer ici
|
|
6. | VERIFIER LES DTC (RADAR CRUISE 2) |
(a) Supprimer les DTC.
Cliquer ici
(b) S'assurer que les conditions de dÃĐtection du DTC sont rÃĐunies.
CONSEIL:
Si les conditions de dÃĐtection ne sont pas remplies, le systÃĻme est incapable de dÃĐtecter les dysfonctionnements.
- Mettre le contacteur d'alimentation en position ON (IG).
- Activer le systÃĻme de rÃĐgulateur de vitesse dynamique à radar à l'aide du contacteur principal du rÃĐgulateur de vitesse (bouton ON/OFF).
- avec fonction de suivi de plage à pleine vitesse: Conduire le vÃĐhicule à 5 km/h (3 mi/h) minimum pendant 1 seconde minimum.
sans fonction de suivi de plage à pleine vitesse: Conduire le vÃĐhicule à 36 km/h (22 mi/h) minimum pendant 1 seconde minimum.
(c) VÃĐrifier les DTC.
Cliquer ici
RÃĐsultat:
|
RÃĐsultat | Passer au point |
|---|---|
|
Les DTC U0235 et U1104 ne sont pas ÃĐmis |
A |
| Le DTC U0235 ou U1104 est ÃĐmis |
B |
| A |
|
FIN (L'ENSEMBLE DE CAPTEUR RADAR A ONDES MILLIMETRIQUES ETAIT DEFECTUEUX) |
| B |
|
REMPLACER L'ENSEMBLE D'ECU D'AIDE A LA CONDUITE |
 Perte de communication avec le module du capteur d'embardÃĐe (U0125,U0126,U0129,U0293,U1104)
Perte de communication avec le module du capteur d'embardÃĐe (U0125,U0126,U0129,U0293,U1104)
DESCRIPTION L'ensemble d'ECU d'aide à la conduite communique avec chaque capteur et l'ECU via la communication CAN.
Si
un dysfonctionnement est dÃĐtectÃĐ dans le circuit de communication CAN,
...
 Message de perte de communication avec le module de commande dynamique du vÃĐhicule (U012287-U110487)
Message de perte de communication avec le module de commande dynamique du vÃĐhicule (U012287-U110487)
DESCRIPTION L'ECU de commande de vÃĐhicule hybride communique avec chaque capteur et ECU via la communication CAN.
Si
un dysfonctionnement est dÃĐtectÃĐ dans le circuit de communication CAN,
un ...
D'autres materiaux:
Circuit d'ÃĐclairage
DESCRIPTION L'alimentation
ÃĐlectrique est fournie à l'ÃĐclairage de l'ensemble de rÃĐcepteur de
navigation et de contacteur au volant lorsque le contacteur de commande
d'ÃĐclairage est en position Tail ou Head. SCHEMA DE CABLAGE
MESURE DE PRECAUTION / REMARQUE / CONSEIL
REMARQUE:
Le ...
Niveau de biais du signal du capteur de courant de batterie
hybride/EV "A" en dehors de la plage admise / dysfonctionnement du
rÃĐglage zÃĐro (P0ABF28)
DESCRIPTION Se reporter à la description pour le DTC P0ABF11.
Cliquer ici
N° de DTC Objet de la dÃĐtection
Condition de dÃĐtection du DTC
Organe incriminÃĐ MIL
Avertissement indiquÃĐ
P0ABF28 Niveau
de biais du signal du capteur de courant de batter ...
Systeme De Diagnostic
SYSTEME DE DIAGNOSTIC DESCRIPTION (a)
Les donnÃĐes du systÃĻme de clÃĐ intelligente (pour fonction d'ouverture)
et les codes de diagnostic (DTC) peuvent Être relevÃĐs via le connecteur
de liaison de donnÃĐes 3 (DLC3) du vÃĐhicule. Dans certains cas, il peut y
avoir un dysfonctionnement dans ...